
Disney의 빅 히어로 (원제 : Big Hero 6)에서 활약하는 매력적인 로봇 (빅 히어로)은 현실적인 존재가 아니다. 그러나 그 밤으로 몸은 확실히 성장하고있는 소프트웨어 로봇 분야의 예이다. 그리고 지금 디즈니 자신이 마치 영화에서 벗어나 온 프로토 타입 인 것 같은 부드러운 로봇 팔을 제작했다.
디즈니 리서치의 로봇 팀이 만든 이 팔은 그 불룩한 모습과 섬세한 소시지 같은 손가락, 그리고 현재의 상태와 정보를 주변 사람에게 보여줄 수있는 내부의 프로젝터 등, 명확하게 빅 히어로의 영향을 받고있는 것으로 보인다.
연구진은 시스템을 설명하는 논문에서 "인간과 로봇의 신체 접촉이 우려되는 장소에서는 인간의 부상이나 하드웨어 손상을 방지하기 위해 로봇은 순종과 동시에 반응 를 제공해야한다 "고 쓰고있다. "우리의 목표는 인간과 물리적으로 상호 작용하면서 객체를 부드럽게 처리 할 수있는 로봇 팔과 손 시스템의 실현이다."
 암의 기계 부품은 평범한 것이다. 팔꿈치와 손목이 다른 많은 로봇 팔처럼 작동 비슷한 서보 모터를 사용하는 식이다.
암의 기계 부품은 평범한 것이다. 팔꿈치와 손목이 다른 많은 로봇 팔처럼 작동 비슷한 서보 모터를 사용하는 식이다.
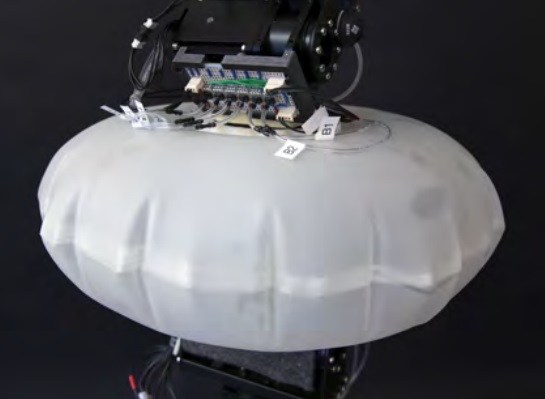 그러나 관절 주위에 큰 베개처럼 보이는 것으로 덮여 있고, 연구자들은이를 "힘 감지 모듈"(force sensing module)이라고 부르고있다. 이것은 공기로 채워져 있고, 그것에 가해지는 압력을 감지 할 수있다. 여기에는 서보 모터를 인간으로부터 보호하고 또 반대로 인간을 서보 모터로부터 보호하는 이중 보호 효과가있다. 또한 자연 접촉 상호 작용을 할 수있게된다.
그러나 관절 주위에 큰 베개처럼 보이는 것으로 덮여 있고, 연구자들은이를 "힘 감지 모듈"(force sensing module)이라고 부르고있다. 이것은 공기로 채워져 있고, 그것에 가해지는 압력을 감지 할 수있다. 여기에는 서보 모터를 인간으로부터 보호하고 또 반대로 인간을 서보 모터로부터 보호하는 이중 보호 효과가있다. 또한 자연 접촉 상호 작용을 할 수있게된다.
"로봇의 다양한 관절에 개별 모듈을 배치함으로써 로봇의 광범위한 접촉 한 힘을 감지하고 공간 인식을 구현하는 것이 가능하게 육체적 인 인간 = 로봇 상호 작용이 가능 있다 "고 그들은 쓰고있다. "개별 감지 영역은 인간이 로봇과 커뮤니케이션하며 만지고 그 움직임을지도하는 것을 가능하게한다."
예를 들어 연구자의 한 사람이 데모하고, 포옹과 같은 것이 가능하게된다 :

이 경우에는 아마도이 로봇 (그리고 아마도 로봇의 나머지 부분)은 자신이 포옹되어 있다는 것을 이해하고 같은 동작을 반환하거나 다른 동작을하거나하게 될 것이다 .
그 손가락도 부드럽고 중공 구조로되어있다. 이들은 강성 재료와 부드러운 재료를 모두 사용할 수있는 3D 프린터로 만든있다. 예를 들어 팽창 식의 각 손가락의 압력 센서는 하나의 손가락이 강하게 밀려 있고, 모든 무게를 지탱하고있는 등의 정보를 감지하여 그 정보를 그립의 조정을 위해 로봇에 전달 .
물론 이것은 아직 프로토 타입에 불과하다. 센서는 아직 힘의 방향을 감지 할 수없이 재료와 구조는 기밀을 목표로 한 것이 아니기 때문에 연속적으로 펌프로 공기를 주입해야한다. 그러나 그럼에도 불구하고 그것은 연구자들이 보여주고 싶었다 것을 표현하는 데 성공하고있다. 즉, 종래의 "하드"로봇이 약간 독창성에서 "소프트"하게 개조 할 수 있다는 것을 보여주고있는 것이다. 빅 히어로를 실현하는 길은 멀지 만 지금은 아직 소설보다 과학에 가까운 단계 인 것이다.